DON’T WAIT ANY LONGER
Technology

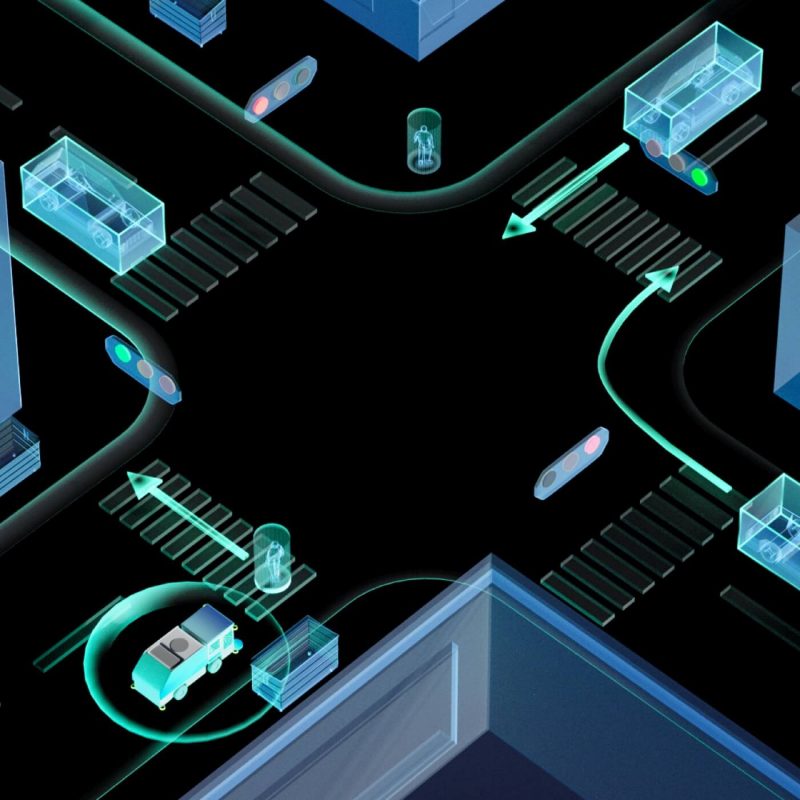
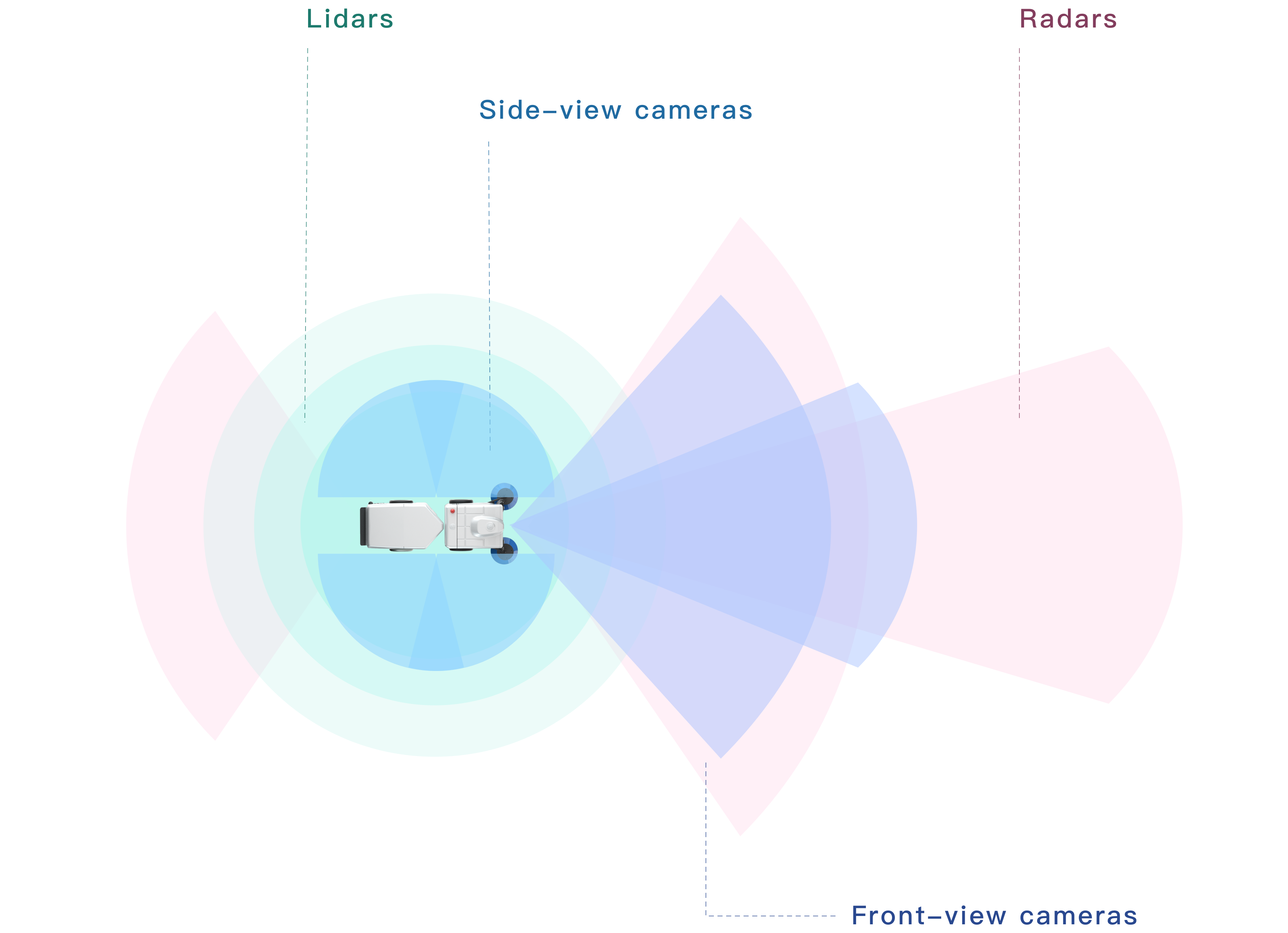
Perception
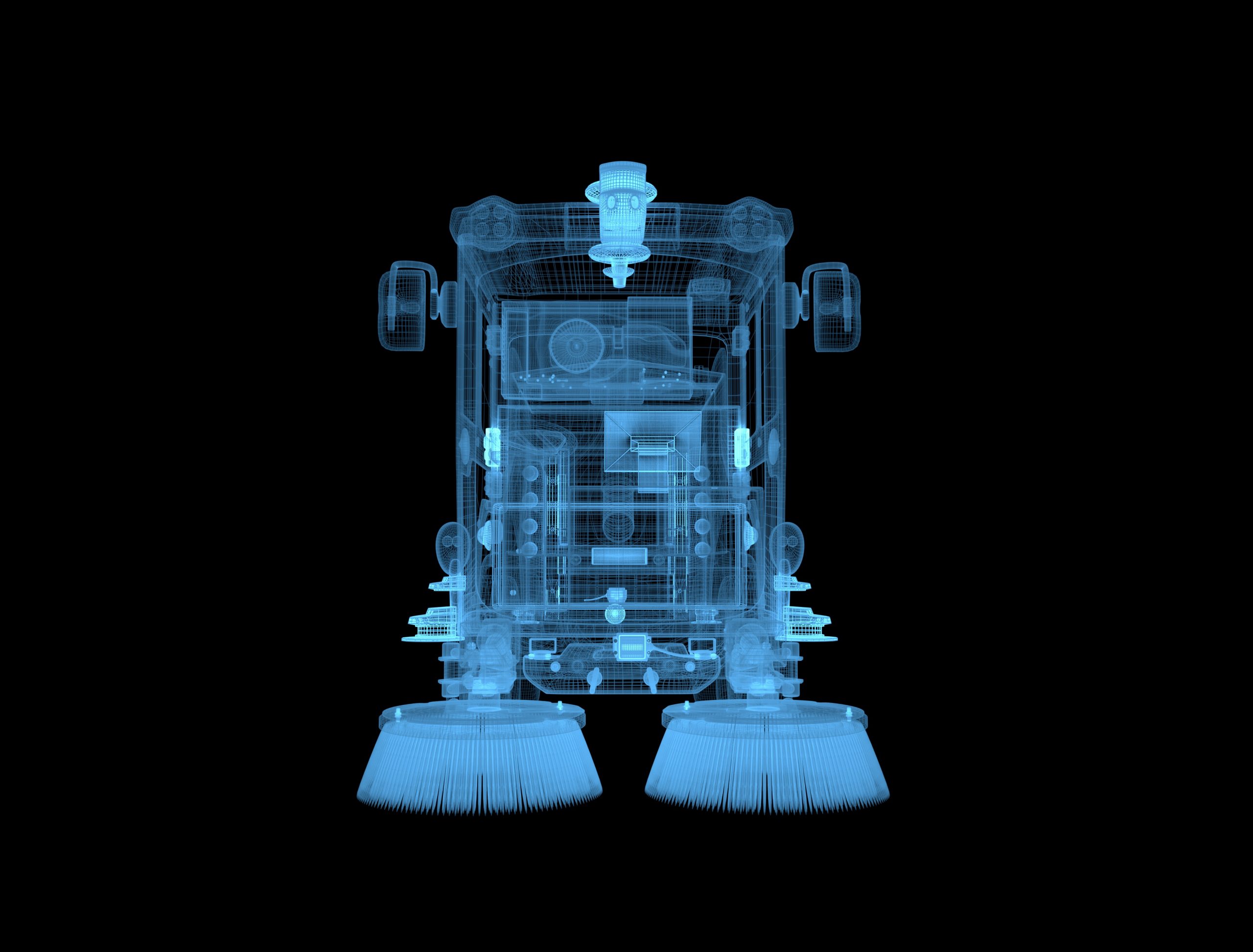
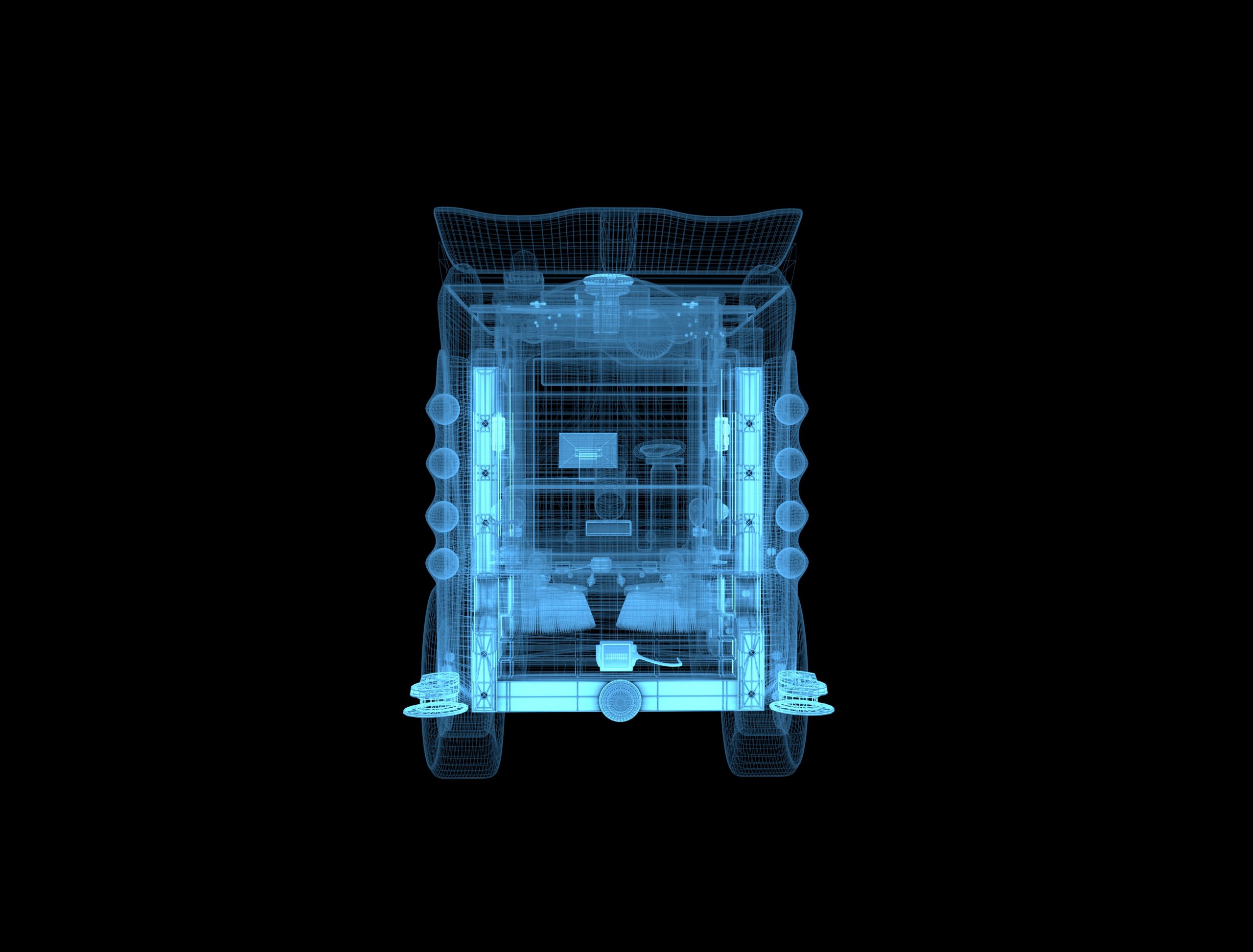
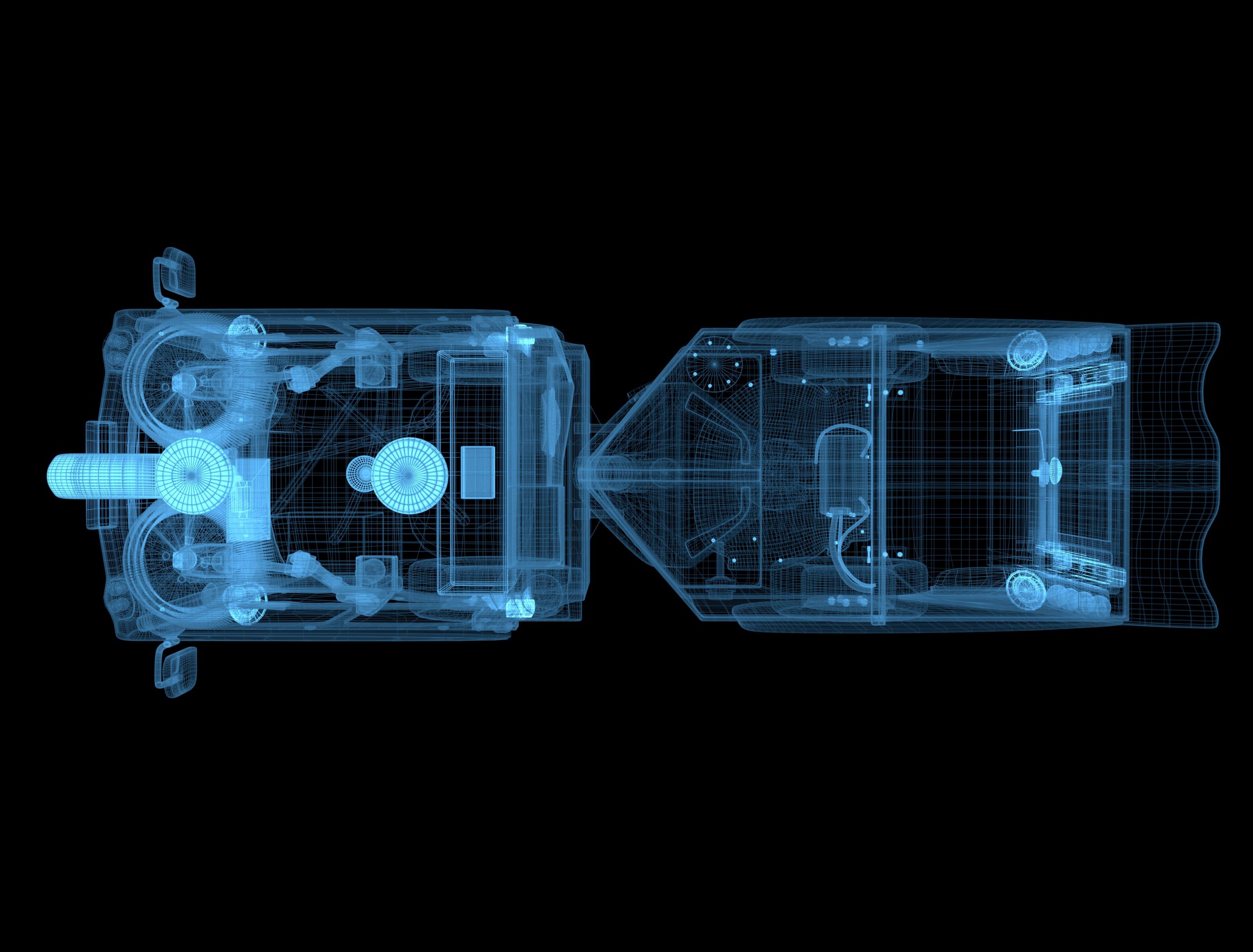
Multi-sensor arrangement with 360° full coverage of surroundings
Accurate and efficient recognition algorithm
Localization
Centimeter level precise positioning
Automatic HD-map generation

Planning
Real-time optimization algorithms that control key vehicle operations in autonomous mode

Implementation
Data processing and distributed data storage with the Integration of vehicle layer, data layer and user layer to execute instructions more efficiently
Arrow left
Arrow right
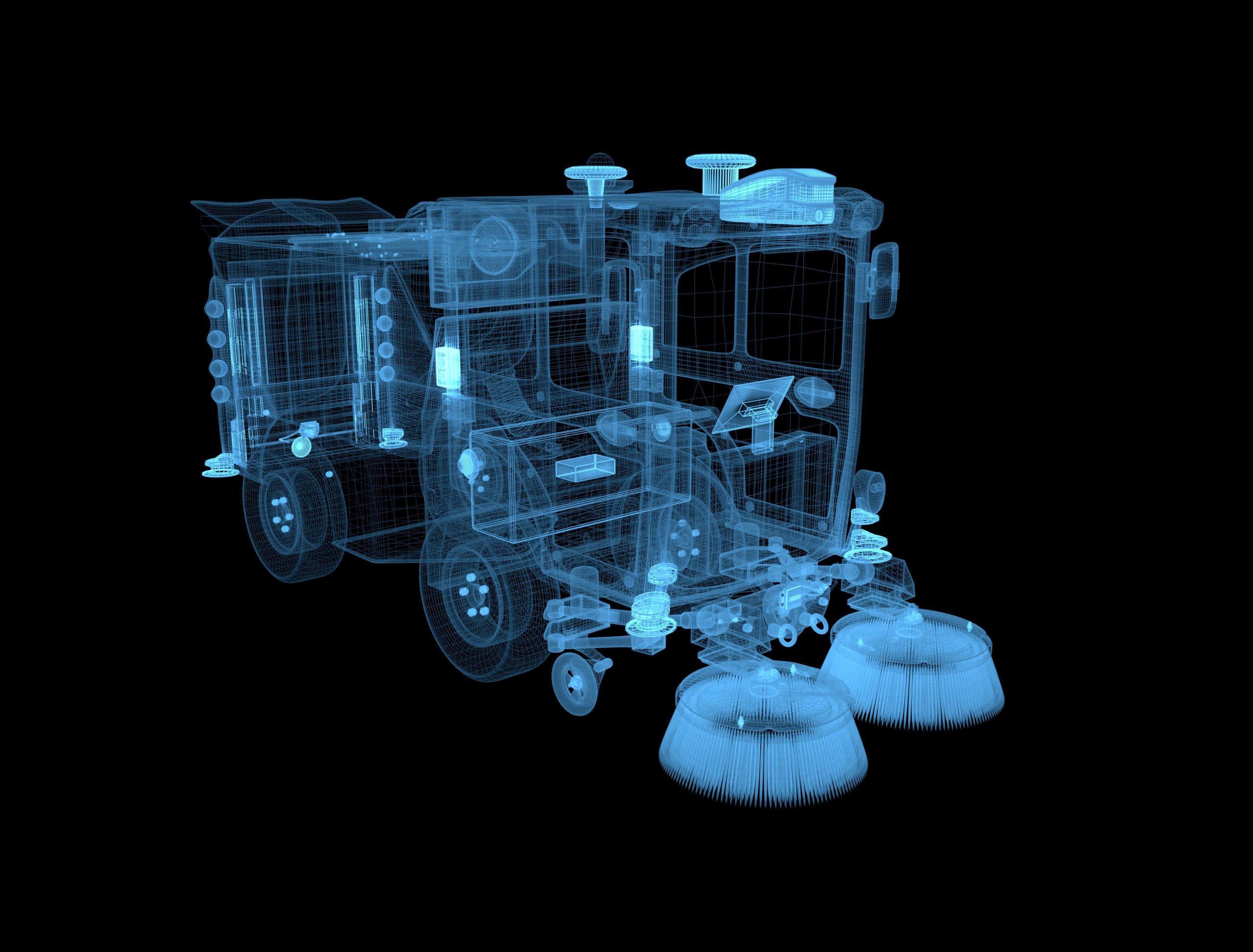
GNSS Antenna Receives satellite signals. 2 GNSS antennas are mounted on the top of our autonomous sweeper to receive the heading of sweeper.
LiDAR Uses eye-safe laser beams to create a 3D representation of the surveyed environment.
Live streaming camera Used for real-time video streaming of the vehicle’s surroundings.
GNSS Receiver Collects satellite signal data sources, receiving vehicle’s current latitude, longitude, altitude, heading, velocity, and other information.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Millimeter Radar Uses electromagnetic waves of a short-range wavelength to measure the range, distance, and velocity of moving objects. Located at the front and the back of the vehicle.
Live streaming camera Used for real-time video streaming of the vehicle’s surroundings.
LiDAR Uses eye-safe laser beams to create a 3D representation of the surveyed environment.
Live streaming camera Used for real-time video streaming of the vehicle’s surroundings.
Live streaming camera Used for real-time video streaming of the vehicle’s surroundings.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
GNSS Receiver Collects satellite signal data sources, receiving vehicle’s current latitude, longitude, altitude, heading, velocity, and other information.
Millimeter Radar Uses electromagnetic waves of a short-range wavelength to measure the range, distance, and velocity of moving objects. Located at the front and the back of the vehicle.
Perception camera Used to gather and collect images necessary for creating visual recognition algorithms.
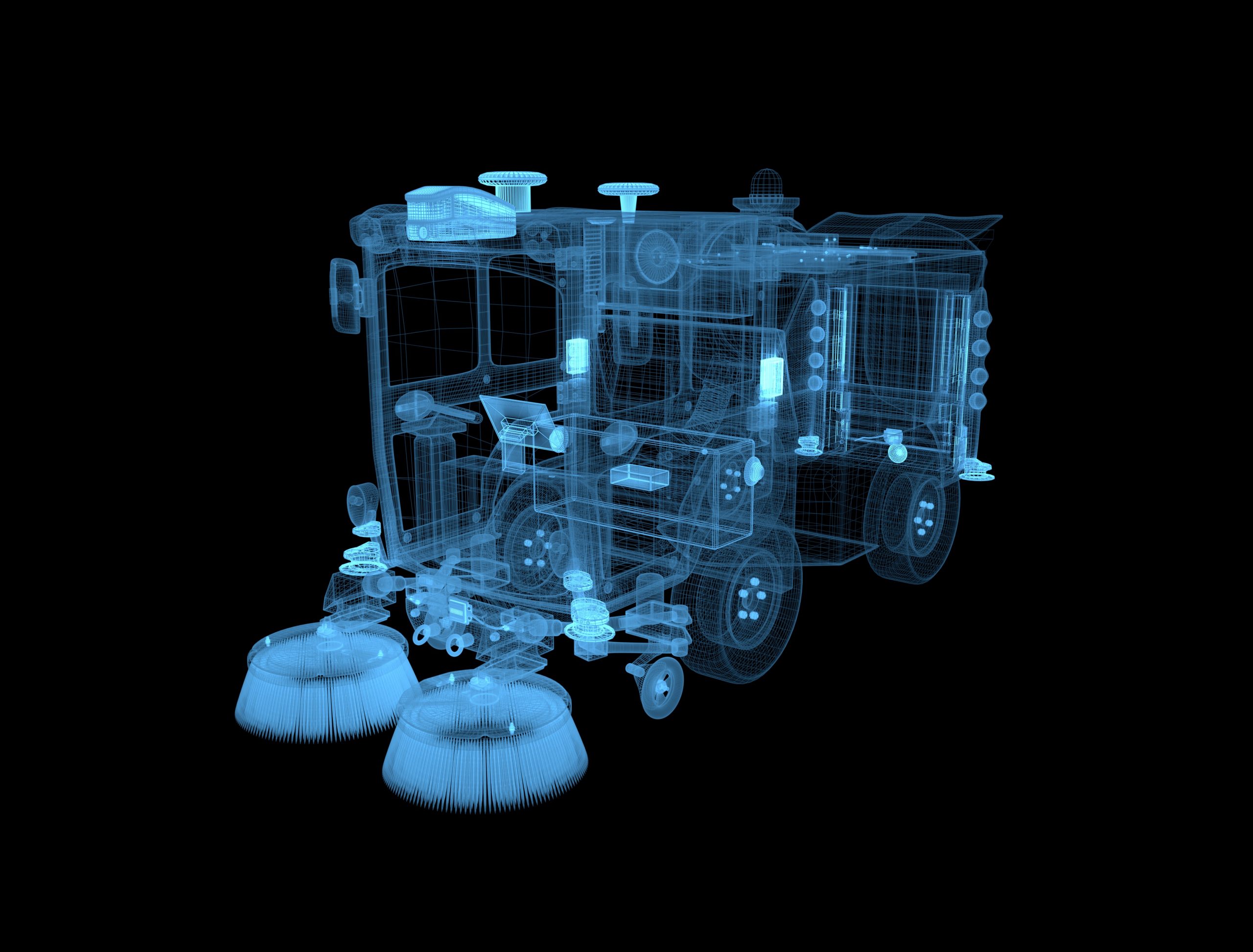
GNSS Antenna Receives satellite signals. 2 GNSS antennas are mounted on the top of our autonomous sweeper to receive the heading of sweeper.
LiDAR Uses eye-safe laser beams to create a 3D representation of the surveyed environment.
Live streaming camera Used for real-time video streaming of the vehicle’s surroundings.
GNSS Receiver Collects satellite signal data sources, receiving vehicle’s current latitude, longitude, altitude, heading, velocity, and other information.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
GNSS Antenna Receives satellite signals. 2 GNSS antennas are mounted on the top of our autonomous sweeper to receive the heading of sweeper.
Collision sensor Sends out an alert to the engineers if an object hits the vehicle.
Collision sensor Sends out an alert to the engineers if an object hits the vehicle.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
LiDAR Uses eye-safe laser beams to create a 3D representation of the surveyed environment.
LiDAR Uses eye-safe laser beams to create a 3D representation of the surveyed environment.
Live streaming camera Used for real-time video streaming of the vehicle’s surroundings.
Millimeter Radar Uses electromagnetic waves of a short-range wavelength to measure the range, distance, and velocity of moving objects. Located at the front and the back of the vehicle.
GNSS Receiver Collects satellite signal data sources, receiving vehicle’s current latitude, longitude, altitude, heading, velocity, and other information.
LiDAR Uses eye-safe laser beams to create a 3D representation of the surveyed environment.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
GNSS Antenna Receives satellite signals. 2 GNSS antennas are mounted on the top of our autonomous sweeper to receive the heading of sweeper.
GNSS Receiver Collects satellite signal data sources, receiving vehicle’s current latitude, longitude, altitude, heading, velocity, and other information.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Ultrasonic Radar Uses radio waves to measure the range, distance, and velocity of moving objects.
Remote Control Platform Radar24

Status Diagnosis
Radar24 can view the cleaning progress, monitor and diagnose the steering wheel, throttle/brake, ADS system status, etc. It also has forewarning function to notify the abnormal status in time.
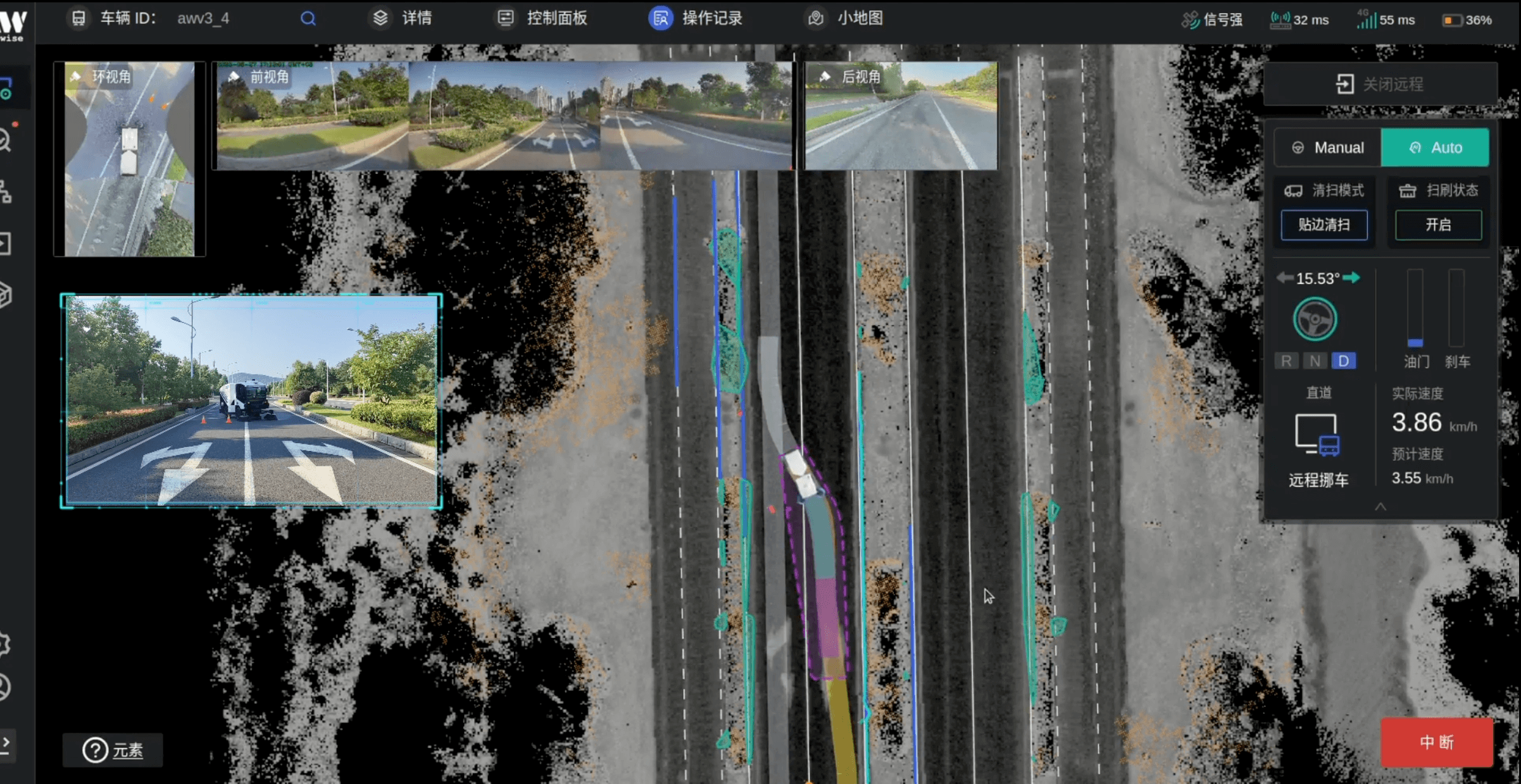
Intelligent Vehicle Control
When the vehicle encounters abnormal stop, the remote operators can initiate remote moving, obstacle avoidence, route switching to move the vehicle out of trouble.
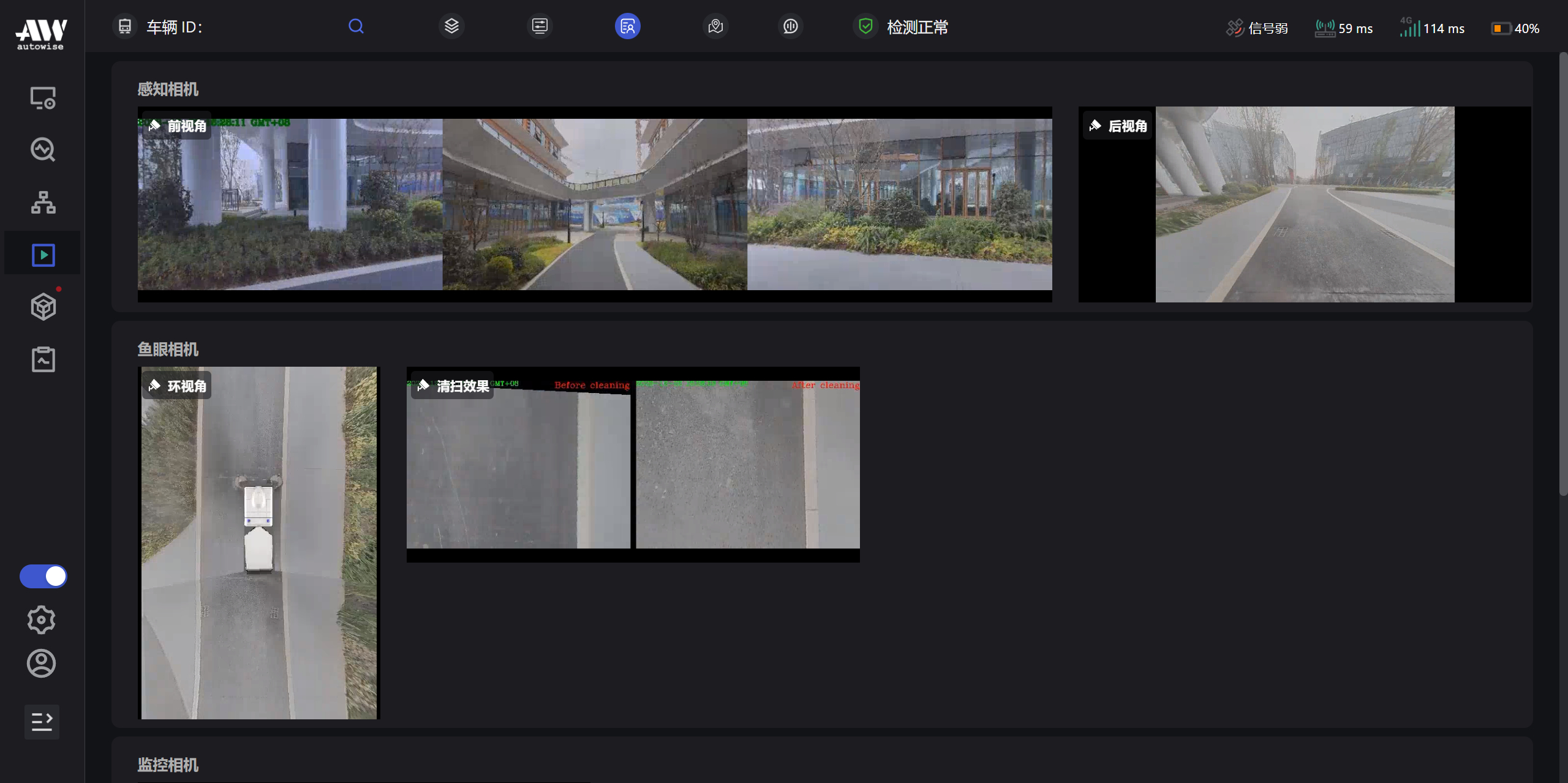
Visual Monitoring
The platform can display rich and dynamic road information in real time, as well as the on-site operating environment from various perspectives such as front perspective, rear perspective, left and right brush perspectives, and identify obstacles and visual blind spots to ensure vehicle driving safety.
Remote Control APP WiAction
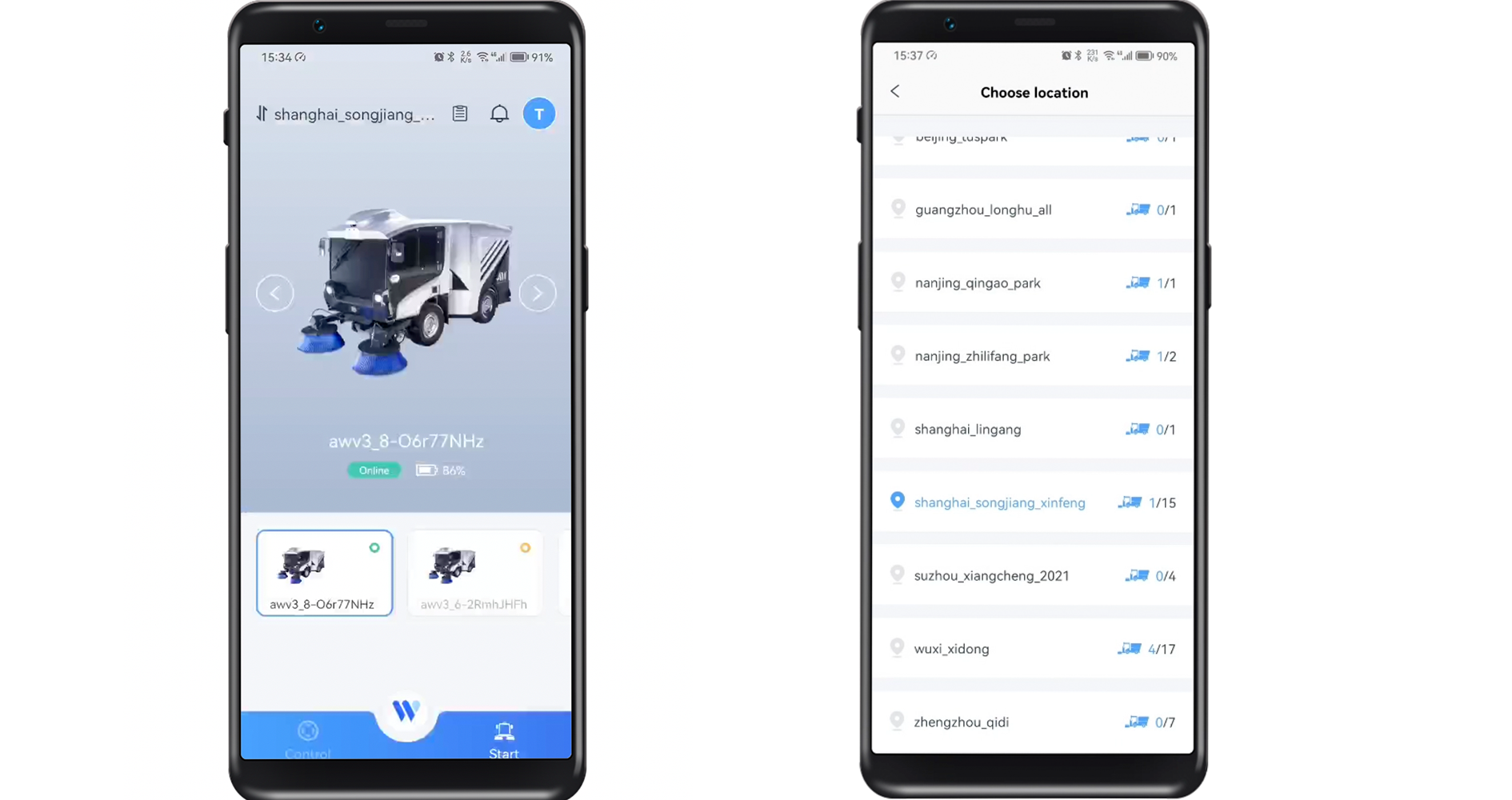
Task Selection
Users can switch cleaning sites and swipe left or right to select the target vehicle to perform the cleaning task according to the need.
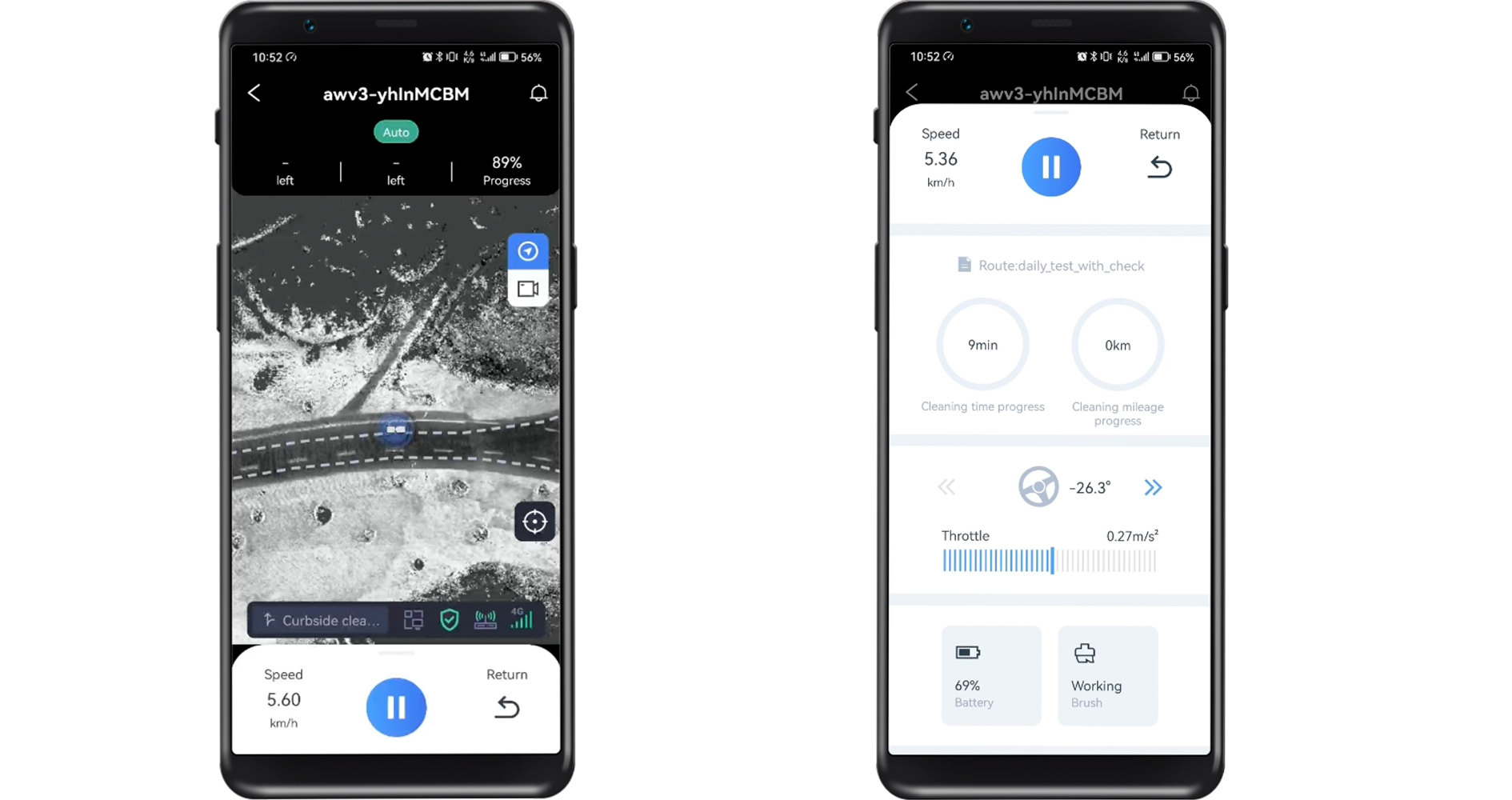
Remote Control
Users can remotely start and stop the vehicle through the platform, and check the vehicle’s operation status, vehicle cleaning tasks, throttle/brake, battery level and other status. After the task is completed, the vehicle can automatically return to the starting point and park with one click.
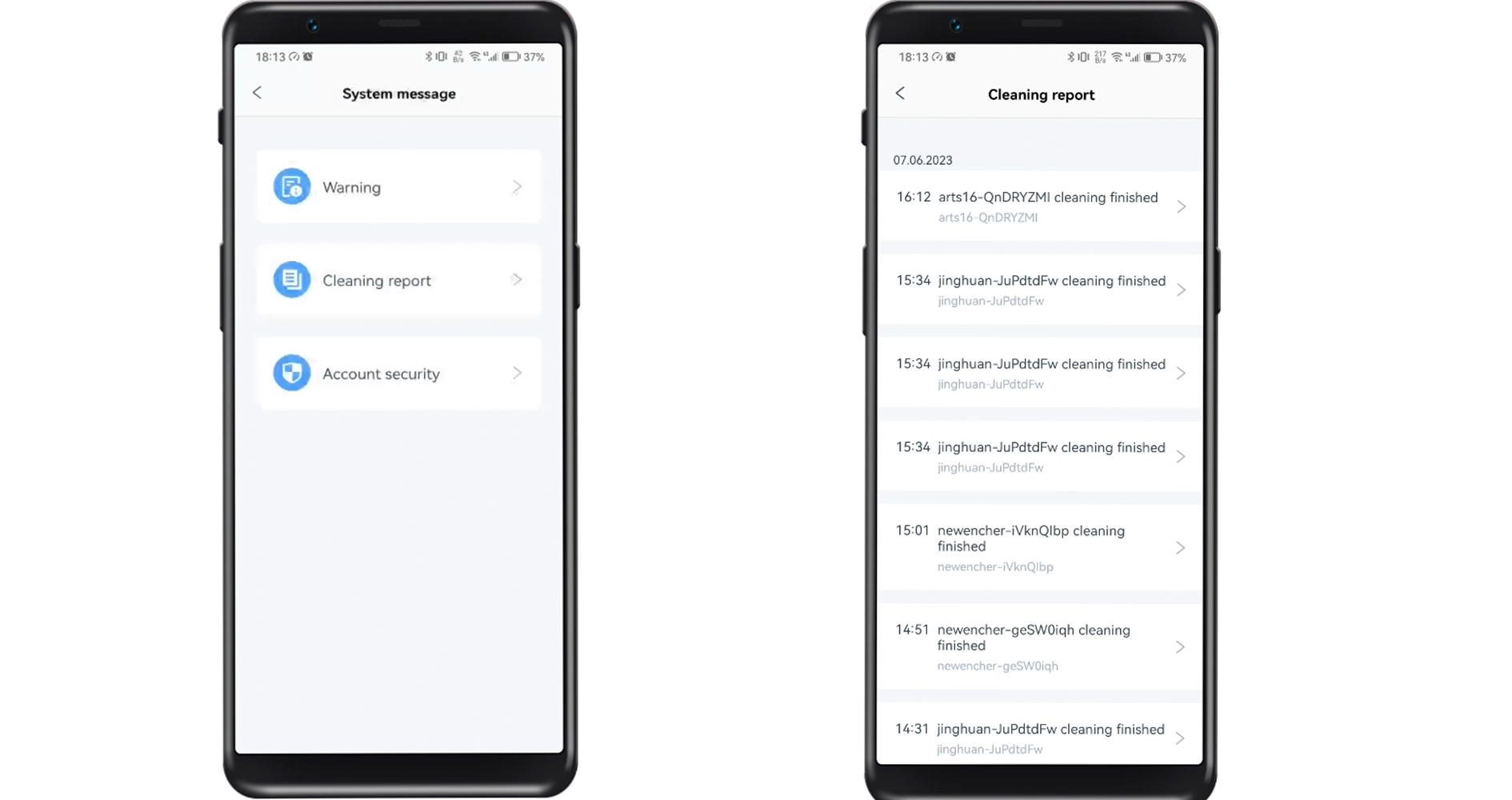
View Report
After the cleaning task automatically completed , the platform will automatically generate a job report. Users can analyze the cleaning effect by viewing the system logs and cleaning reports.

Autonomous Emergency Breaking (AEB)
The Autowise AEB system uses sensors to measure the distance of the sweeper from, objects, pedestrians, and surrounding traffic. Thereby, engaging the brakes if there is a threat of collision. In manual mode, AEB will also alert a driver if there is an imminent collision.

Traffic Light Recognition
Integrated algorithms and cameras allow the vehicle to identify traffic lights. This allows the sweeper to stop on red and go on green.
Detection Software
Data from all sensors allow the sweeper to identify people, animals, static or moving objects within its vicinity. If obstructed, the sweeper will automatically change its route to avoid a collision.


Backup Computing System
An offsite secondary computer acts as a backup for the onboard computing system and ECS. If the onboard computing system crashes, the secondary computer takes over its functions.

Regionalized Data Centers
Client data is stored in a data center that is within their closest geographic region.

Data Encryption
All stored data in the cloud is converted from readable, or plaintext format into an unreadable, encoded format
System Diagnostics
Automatic system checks to identify weak points, determining the cause of a problem, or status of the operating systems
Blind Spot Detection
BSD uses ultrasonic and radar sensors on the side and rear of the car to track traffic in the adjacent lane or front of the sweeper, or directly alongside the sweeper.








FOLLOW US